| 模型 Model | 精确率 Precision/ % | 召回率 Recall/ % | 平均精度AP/% | 平均精度均值 mAP/% | 权重 Weight file size/Mb | |||
|---|---|---|---|---|---|---|---|---|
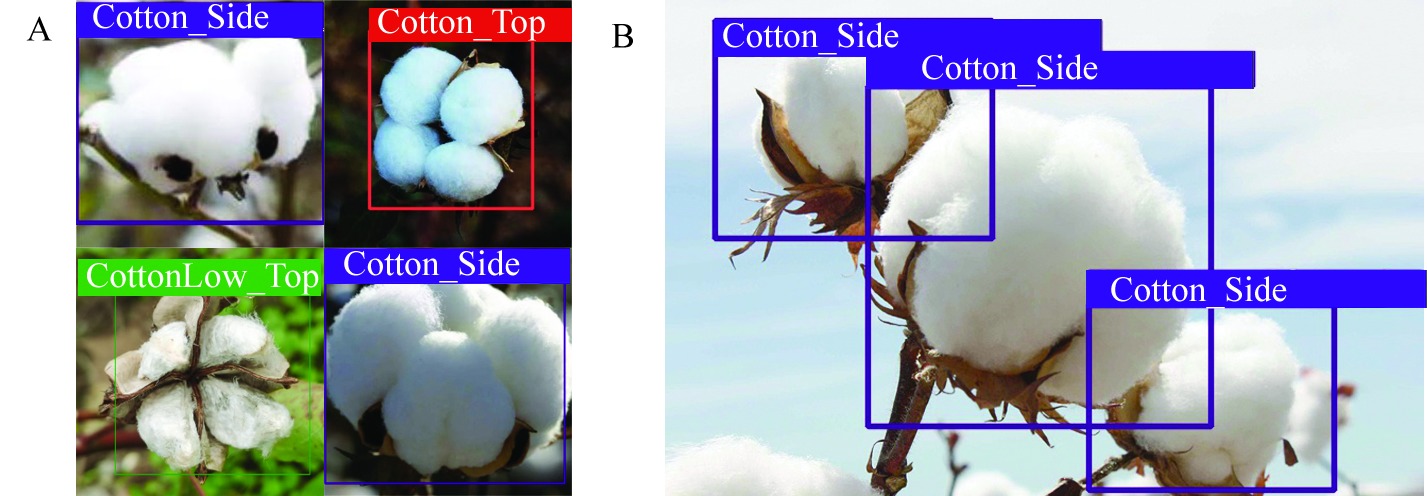
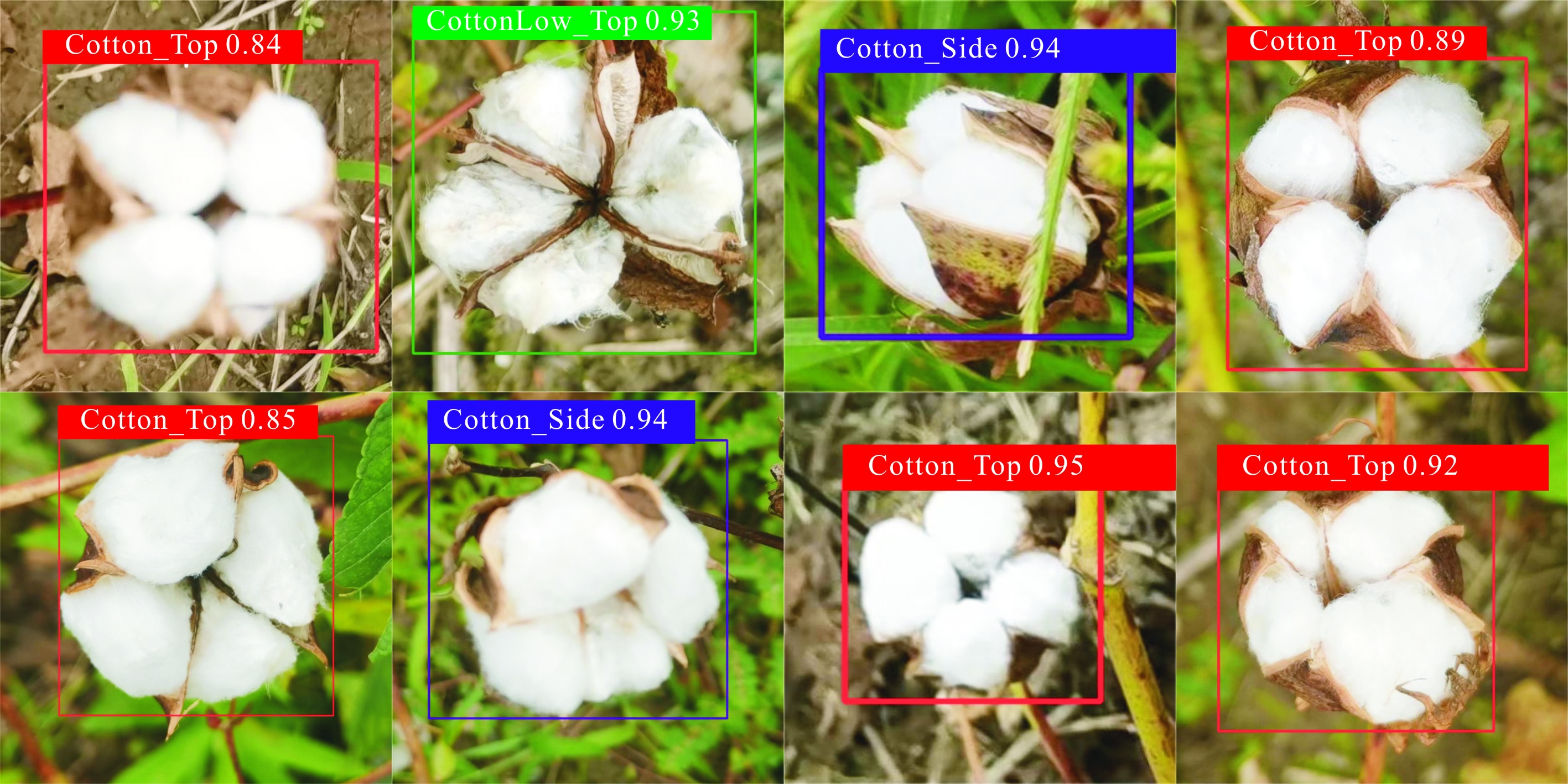
| 正面普通棉花 Positive normal cotton | 正面低品级棉花 Positive low-grade cotton | 侧面棉花 Side cotton | 其他白色花朵 Other white flowers | |||||
| SSD | 74.3 | 52.7 | 72.3 | 66.5 | 71.9 | 69.1 | 70.0 | 93.2 |
| Fast R-CNN | 59.7 | 44.8 | 42.3 | 38.7 | 41.5 | 38.4 | 40.2 | 108.0 |
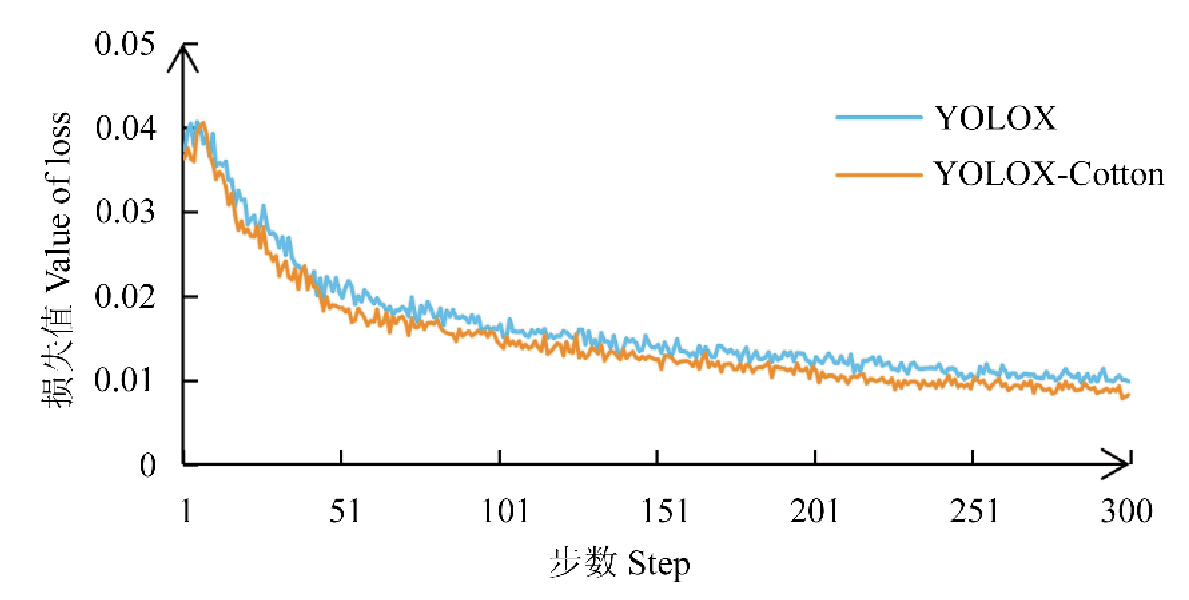
| YOLOX | 87.7 | 81.3 | 88.9 | 85.2 | 87.4 | 83.8 | 86.3 | 14.7 |
| YOLOv8 | 87.1 | 79.2 | 87.2 | 84.3 | 86.7 | 83.4 | 85.4 | 22.5 |
| YOLOX-Cotton | 92.9 | 86.8 | 94.6 | 91.8 | 93.2 | 90.2 | 92.4 | 18.3 |